


Hoe cool zou het zijn als je een eigen RFID-slot op de deur van je Lab hebt zitten? (Lab… nou ja mijn computerkamer).
De deur kunnen openen door er een tag voor te houden! Voor dat soort gekkigheid ben ik wel in.
Het is wel zo dat je even een elektrisch slot in de deurpost moet maken en in mijn geval heb ik ook de klink maar uit de deur gehaald, anders was het nog makkelijk binnen komen 😉
Voor dit project heb ik gebruik gemaakt van de volgende onderdelen:
- Arduino-compatible Pro Micro Atmega32u4
- RFID-RC522 card-reader
- Single Ralay Module
- 3 Led’s: Rood, Groen en Geel
Het systeem werkt als volgt:
De eerst keer moet er een Master-Tag ingesteld worden, deze gebruik je om nieuwe tags toe te voegen of tags weer uit het systeem te verwijderen.
Om het slot te openen houd je de tag voor de reader, wanneer deze bekent is in het systeem zal het relais omschakelen en het daarop aangesloten slot zal geopend worden.
Nieuwe tag toevoegen:
- Houd de Master-tag voor de de reader, het systeem zal in “leer-modus” gaan.
- Houd nu de nieuwe tag kort voor de reader.
Het is mogelijk om meedere tags achter elkaar aan kort voor de reader te houden, wanneer je alle tags hebt gehad ga je naar de volgende stap. - Opnieuw houd je de Master-tag voor de reader, het systeem zal de leer-modus afsluiten.
Voor het verwijderen van een tag uit het systeem volg je ook de zelfde stappen. Nu zal het effect zijn dat een tag geen toegang meer heeft.
Aansluiten:
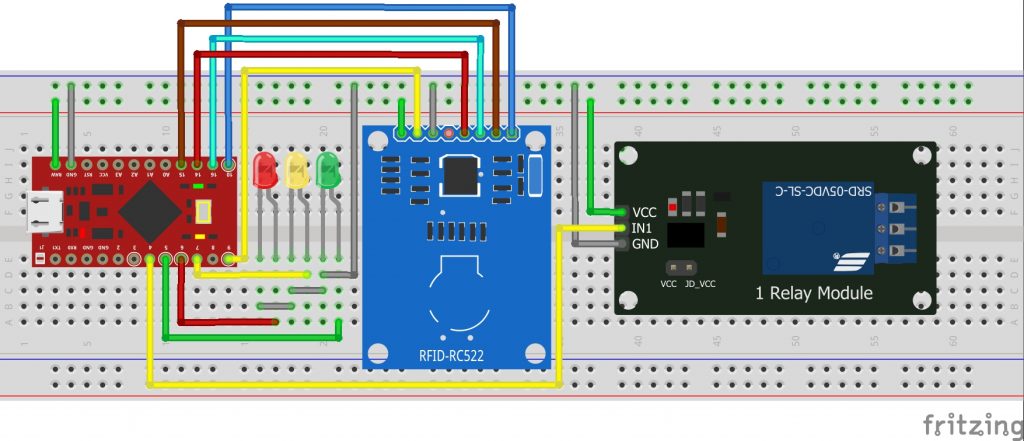
Wanneer je de code zal bekijken, zal je een stukje tegen komen over een reset/wipe button. Deze heb ik in mijn geval niet gebruikt en daarom ontbreekt het ook in de tekening.
Belangrijk! Zorg dat je altijd op een alternatieve manier de deur weer kan openen! Houd er rekening mee dat dit systeem niet Hacker Proof is!
Onderstaande code heb ik gebruikt:
/*
Arduino RFID Access Control
Security !
To keep it simple we are going to use Tag's Unique IDs
as only method of Authenticity. It's simple and not hacker proof.
If you need security, don't use it unless you modify the code
Copyright (C) 2015 Omer Siar Baysal
This program is free software; you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation; either version 2 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License along
with this program; if not, write to the Free Software Foundation, Inc.,
51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.
*/
#include <EEPROM.h> // We are going to read and write PICC's UIDs from/to EEPROM
#include <SPI.h> // RC522 Module uses SPI protocol
#include <MFRC522.h> // Library for Mifare RC522 Devices
/*
Instead of a Relay maybe you want to use a servo
Servos can lock and unlock door locks too
There are examples out there.
*/
// #include <Servo.h>
/*
For visualizing whats going on hardware
we need some leds and
to control door lock a relay and a wipe button
(or some other hardware)
Used common anode led,digitalWriting HIGH turns OFF led
Mind that if you are going to use common cathode led or
just seperate leds, simply comment out #define COMMON_ANODE,
*/
#define COMMON_ANODE
#ifdef COMMON_ANODE
#define LED_ON LOW
#define LED_OFF HIGH
#else
#define LED_ON HIGH
#define LED_OFF LOW
#endif
#define redLed 7 // Set Led Pins
#define greenLed 6
#define blueLed 5
#define relay 4 // Set Relay Pin
#define wipeB 3 // Button pin for WipeMode
boolean match = false; // initialize card match to false
boolean programMode = false; // initialize programming mode to false
boolean replaceMaster = false;
int successRead; // Variable integer to keep if we have Successful Read from Reader
byte storedCard[4]; // Stores an ID read from EEPROM
byte readCard[4]; // Stores scanned ID read from RFID Module
byte masterCard[4]; // Stores master card's ID read from EEPROM
/*
We need to define MFRC522's pins and create instance
Pin layout should be as follows (on Arduino Uno):
MOSI: Pin 11 / ICSP-4
MISO: Pin 12 / ICSP-1
SCK : Pin 13 / ICSP-3
SS : Pin 10 (Configurable)
RST : Pin 9 (Configurable)
look MFRC522 Library for
other Arduinos' pin configuration
*/
#define SS_PIN 10
#define RST_PIN 9
MFRC522 mfrc522(SS_PIN, RST_PIN); // Create MFRC522 instance.
///////////////////////////////////////// Setup ///////////////////////////////////
void setup() {
//Arduino Pin Configuration
pinMode(redLed, OUTPUT);
pinMode(greenLed, OUTPUT);
pinMode(blueLed, OUTPUT);
pinMode(wipeB, INPUT_PULLUP); // Enable pin's pull up resistor
pinMode(relay, OUTPUT);
//Be careful how relay circuit behave on while resetting or power-cycling your Arduino
digitalWrite(relay, HIGH); // Make sure door is locked
digitalWrite(redLed, LED_OFF); // Make sure led is off
digitalWrite(greenLed, LED_OFF); // Make sure led is off
digitalWrite(blueLed, LED_OFF); // Make sure led is off
//Protocol Configuration
Serial.begin(9600); // Initialize serial communications with PC
SPI.begin(); // MFRC522 Hardware uses SPI protocol
mfrc522.PCD_Init(); // Initialize MFRC522 Hardware
//If you set Antenna Gain to Max it will increase reading distance
//mfrc522.PCD_SetAntennaGain(mfrc522.RxGain_max);
Serial.println(F("Access Control v3.4")); // For debugging purposes
ShowReaderDetails(); // Show details of PCD - MFRC522 Card Reader details
//Wipe Code if Button Pressed while setup run (powered on) it wipes EEPROM
if (digitalRead(wipeB) == LOW) { // when button pressed pin should get low, button connected to ground
digitalWrite(redLed, LED_ON); // Red Led stays on to inform user we are going to wipe
Serial.println(F("Wipe Button Pressed"));
Serial.println(F("You have 15 seconds to Cancel"));
Serial.println(F("This will be remove all records and cannot be undone"));
delay(15000); // Give user enough time to cancel operation
if (digitalRead(wipeB) == LOW) { // If button still be pressed, wipe EEPROM
Serial.println(F("Starting Wiping EEPROM"));
for (int x = 0; x < EEPROM.length(); x = x + 1) { //Loop end of EEPROM address
if (EEPROM.read(x) == 0) { //If EEPROM address 0
// do nothing, already clear, go to the next address in order to save time and reduce writes to EEPROM
}
else {
EEPROM.write(x, 0); // if not write 0 to clear, it takes 3.3mS
}
}
Serial.println(F("EEPROM Successfully Wiped"));
digitalWrite(redLed, LED_OFF); // visualize successful wipe
delay(200);
digitalWrite(redLed, LED_ON);
delay(200);
digitalWrite(redLed, LED_OFF);
delay(200);
digitalWrite(redLed, LED_ON);
delay(200);
digitalWrite(redLed, LED_OFF);
}
else {
Serial.println(F("Wiping Cancelled"));
digitalWrite(redLed, LED_OFF);
}
}
// Check if master card defined, if not let user choose a master card
// This also useful to just redefine Master Card
// You can keep other EEPROM records just write other than 143 to EEPROM address 1
// EEPROM address 1 should hold magical number which is '143'
if (EEPROM.read(1) != 143) {
Serial.println(F("No Master Card Defined"));
Serial.println(F("Scan A PICC to Define as Master Card"));
do {
successRead = getID(); // sets successRead to 1 when we get read from reader otherwise 0
digitalWrite(blueLed, LED_ON); // Visualize Master Card need to be defined
delay(200);
digitalWrite(blueLed, LED_OFF);
delay(200);
}
while (!successRead); // Program will not go further while you not get a successful read
for ( int j = 0; j < 4; j++ ) { // Loop 4 times
EEPROM.write( 2 + j, readCard[j] ); // Write scanned PICC's UID to EEPROM, start from address 3
}
EEPROM.write(1, 143); // Write to EEPROM we defined Master Card.
Serial.println(F("Master Card Defined"));
}
Serial.println(F("-------------------"));
Serial.println(F("Master Card's UID"));
for ( int i = 0; i < 4; i++ ) { // Read Master Card's UID from EEPROM
masterCard[i] = EEPROM.read(2 + i); // Write it to masterCard
Serial.print(masterCard[i], HEX);
}
Serial.println("");
Serial.println(F("-------------------"));
Serial.println(F("Everything Ready"));
Serial.println(F("Waiting PICCs to be scanned"));
cycleLeds(); // Everything ready lets give user some feedback by cycling leds
}
///////////////////////////////////////// Main Loop ///////////////////////////////////
void loop () {
do {
successRead = getID(); // sets successRead to 1 when we get read from reader otherwise 0
if (digitalRead(wipeB) == LOW) {
digitalWrite(redLed, LED_ON); // Make sure led is off
digitalWrite(greenLed, LED_OFF); // Make sure led is off
digitalWrite(blueLed, LED_OFF); // Make sure led is off
Serial.println(F("Wipe Button Pressed"));
Serial.println(F("Master Card will be Erased! in 10 seconds"));
delay(10000);
if (digitalRead(wipeB) == LOW) {
EEPROM.write(1, 0); // Reset Magic Number.
Serial.println(F("Restart device to re-program Master Card"));
while (1);
}
}
if (programMode) {
cycleLeds(); // Program Mode cycles through RGB waiting to read a new card
}
else {
normalModeOn(); // Normal mode, blue Power LED is on, all others are off
}
}
while (!successRead); //the program will not go further while you not get a successful read
if (programMode) {
if ( isMaster(readCard) ) { //If master card scanned again exit program mode
Serial.println(F("Master Card Scanned"));
Serial.println(F("Exiting Program Mode"));
Serial.println(F("-----------------------------"));
programMode = false;
return;
}
else {
if ( findID(readCard) ) { // If scanned card is known delete it
Serial.println(F("I know this PICC, removing..."));
deleteID(readCard);
Serial.println("-----------------------------");
Serial.println(F("Scan a PICC to ADD or REMOVE to EEPROM"));
}
else { // If scanned card is not known add it
Serial.println(F("I do not know this PICC, adding..."));
writeID(readCard);
Serial.println(F("-----------------------------"));
Serial.println(F("Scan a PICC to ADD or REMOVE to EEPROM"));
}
}
}
else {
if ( isMaster(readCard)) { // If scanned card's ID matches Master Card's ID enter program mode
programMode = true;
Serial.println(F("Hello Master - Entered Program Mode"));
int count = EEPROM.read(0); // Read the first Byte of EEPROM that
Serial.print(F("I have ")); // stores the number of ID's in EEPROM
Serial.print(count);
Serial.print(F(" record(s) on EEPROM"));
Serial.println("");
Serial.println(F("Scan a PICC to ADD or REMOVE to EEPROM"));
Serial.println(F("Scan Master Card again to Exit Program Mode"));
Serial.println(F("-----------------------------"));
}
else {
if ( findID(readCard) ) { // If not, see if the card is in the EEPROM
Serial.println(F("Welcome, You shall pass"));
granted(3000); // Open the door lock for 300 ms
}
else { // If not, show that the ID was not valid
Serial.println(F("You shall not pass"));
denied();
}
}
}
}
///////////////////////////////////////// Access Granted ///////////////////////////////////
void granted (int setDelay) {
digitalWrite(blueLed, LED_OFF); // Turn off blue LED
digitalWrite(redLed, LED_OFF); // Turn off red LED
digitalWrite(greenLed, LED_ON); // Turn on green LED
digitalWrite(relay, LOW); // Unlock door!
delay(setDelay); // Hold door lock open for given seconds
digitalWrite(relay, HIGH); // Relock door
delay(1000); // Hold green LED on for a second
}
///////////////////////////////////////// Access Denied ///////////////////////////////////
void denied() {
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
digitalWrite(redLed, LED_ON); // Turn on red LED
delay(1000);
}
///////////////////////////////////////// Get PICC's UID ///////////////////////////////////
int getID() {
// Getting ready for Reading PICCs
if ( ! mfrc522.PICC_IsNewCardPresent()) { //If a new PICC placed to RFID reader continue
return 0;
}
if ( ! mfrc522.PICC_ReadCardSerial()) { //Since a PICC placed get Serial and continue
return 0;
}
// There are Mifare PICCs which have 4 byte or 7 byte UID care if you use 7 byte PICC
// I think we should assume every PICC as they have 4 byte UID
// Until we support 7 byte PICCs
Serial.println(F("Scanned PICC's UID:"));
for (int i = 0; i < 4; i++) { //
readCard[i] = mfrc522.uid.uidByte[i];
Serial.print(readCard[i], HEX);
}
Serial.println("");
mfrc522.PICC_HaltA(); // Stop reading
return 1;
}
void ShowReaderDetails() {
// Get the MFRC522 software version
byte v = mfrc522.PCD_ReadRegister(mfrc522.VersionReg);
Serial.print(F("MFRC522 Software Version: 0x"));
Serial.print(v, HEX);
if (v == 0x91)
Serial.print(F(" = v1.0"));
else if (v == 0x92)
Serial.print(F(" = v2.0"));
else
Serial.print(F(" (unknown),probably a chinese clone?"));
Serial.println("");
// When 0x00 or 0xFF is returned, communication probably failed
if ((v == 0x00) || (v == 0xFF)) {
Serial.println(F("WARNING: Communication failure, is the MFRC522 properly connected?"));
Serial.println(F("SYSTEM HALTED: Check connections."));
while (true); // do not go further
}
}
///////////////////////////////////////// Cycle Leds (Program Mode) ///////////////////////////////////
void cycleLeds() {
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
digitalWrite(greenLed, LED_ON); // Make sure green LED is on
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
delay(200);
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
digitalWrite(blueLed, LED_ON); // Make sure blue LED is on
delay(200);
digitalWrite(redLed, LED_ON); // Make sure red LED is on
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
delay(200);
}
//////////////////////////////////////// Normal Mode Led ///////////////////////////////////
void normalModeOn () {
digitalWrite(blueLed, LED_ON); // Blue LED ON and ready to read card
digitalWrite(redLed, LED_OFF); // Make sure Red LED is off
digitalWrite(greenLed, LED_OFF); // Make sure Green LED is off
digitalWrite(relay, HIGH); // Make sure Door is Locked
}
//////////////////////////////////////// Read an ID from EEPROM //////////////////////////////
void readID( int number ) {
int start = (number * 4 ) + 2; // Figure out starting position
for ( int i = 0; i < 4; i++ ) { // Loop 4 times to get the 4 Bytes
storedCard[i] = EEPROM.read(start + i); // Assign values read from EEPROM to array
}
}
///////////////////////////////////////// Add ID to EEPROM ///////////////////////////////////
void writeID( byte a[] ) {
if ( !findID( a ) ) { // Before we write to the EEPROM, check to see if we have seen this card before!
int num = EEPROM.read(0); // Get the numer of used spaces, position 0 stores the number of ID cards
int start = ( num * 4 ) + 6; // Figure out where the next slot starts
num++; // Increment the counter by one
EEPROM.write( 0, num ); // Write the new count to the counter
for ( int j = 0; j < 4; j++ ) { // Loop 4 times
EEPROM.write( start + j, a[j] ); // Write the array values to EEPROM in the right position
}
successWrite();
Serial.println(F("Succesfully added ID record to EEPROM"));
}
else {
failedWrite();
Serial.println(F("Failed! There is something wrong with ID or bad EEPROM"));
}
}
///////////////////////////////////////// Remove ID from EEPROM ///////////////////////////////////
void deleteID( byte a[] ) {
if ( !findID( a ) ) { // Before we delete from the EEPROM, check to see if we have this card!
failedWrite(); // If not
Serial.println(F("Failed! There is something wrong with ID or bad EEPROM"));
}
else {
int num = EEPROM.read(0); // Get the numer of used spaces, position 0 stores the number of ID cards
int slot; // Figure out the slot number of the card
int start; // = ( num * 4 ) + 6; // Figure out where the next slot starts
int looping; // The number of times the loop repeats
int j;
int count = EEPROM.read(0); // Read the first Byte of EEPROM that stores number of cards
slot = findIDSLOT( a ); // Figure out the slot number of the card to delete
start = (slot * 4) + 2;
looping = ((num - slot) * 4);
num--; // Decrement the counter by one
EEPROM.write( 0, num ); // Write the new count to the counter
for ( j = 0; j < looping; j++ ) { // Loop the card shift times
EEPROM.write( start + j, EEPROM.read(start + 4 + j)); // Shift the array values to 4 places earlier in the EEPROM
}
for ( int k = 0; k < 4; k++ ) { // Shifting loop
EEPROM.write( start + j + k, 0);
}
successDelete();
Serial.println(F("Succesfully removed ID record from EEPROM"));
}
}
///////////////////////////////////////// Check Bytes ///////////////////////////////////
boolean checkTwo ( byte a[], byte b[] ) {
if ( a[0] != NULL ) // Make sure there is something in the array first
match = true; // Assume they match at first
for ( int k = 0; k < 4; k++ ) { // Loop 4 times
if ( a[k] != b[k] ) // IF a != b then set match = false, one fails, all fail
match = false;
}
if ( match ) { // Check to see if if match is still true
return true; // Return true
}
else {
return false; // Return false
}
}
///////////////////////////////////////// Find Slot ///////////////////////////////////
int findIDSLOT( byte find[] ) {
int count = EEPROM.read(0); // Read the first Byte of EEPROM that
for ( int i = 1; i <= count; i++ ) { // Loop once for each EEPROM entry
readID(i); // Read an ID from EEPROM, it is stored in storedCard[4]
if ( checkTwo( find, storedCard ) ) { // Check to see if the storedCard read from EEPROM
// is the same as the find[] ID card passed
return i; // The slot number of the card
break; // Stop looking we found it
}
}
}
///////////////////////////////////////// Find ID From EEPROM ///////////////////////////////////
boolean findID( byte find[] ) {
int count = EEPROM.read(0); // Read the first Byte of EEPROM that
for ( int i = 1; i <= count; i++ ) { // Loop once for each EEPROM entry
readID(i); // Read an ID from EEPROM, it is stored in storedCard[4]
if ( checkTwo( find, storedCard ) ) { // Check to see if the storedCard read from EEPROM
return true;
break; // Stop looking we found it
}
else { // If not, return false
}
}
return false;
}
///////////////////////////////////////// Write Success to EEPROM ///////////////////////////////////
// Flashes the green LED 3 times to indicate a successful write to EEPROM
void successWrite() {
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
digitalWrite(greenLed, LED_OFF); // Make sure green LED is on
delay(200);
digitalWrite(greenLed, LED_ON); // Make sure green LED is on
delay(200);
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
delay(200);
digitalWrite(greenLed, LED_ON); // Make sure green LED is on
delay(200);
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
delay(200);
digitalWrite(greenLed, LED_ON); // Make sure green LED is on
delay(200);
}
///////////////////////////////////////// Write Failed to EEPROM ///////////////////////////////////
// Flashes the red LED 3 times to indicate a failed write to EEPROM
void failedWrite() {
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
delay(200);
digitalWrite(redLed, LED_ON); // Make sure red LED is on
delay(200);
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
delay(200);
digitalWrite(redLed, LED_ON); // Make sure red LED is on
delay(200);
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
delay(200);
digitalWrite(redLed, LED_ON); // Make sure red LED is on
delay(200);
}
///////////////////////////////////////// Success Remove UID From EEPROM ///////////////////////////////////
// Flashes the blue LED 3 times to indicate a success delete to EEPROM
void successDelete() {
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
digitalWrite(redLed, LED_OFF); // Make sure red LED is off
digitalWrite(greenLed, LED_OFF); // Make sure green LED is off
delay(200);
digitalWrite(blueLed, LED_ON); // Make sure blue LED is on
delay(200);
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
delay(200);
digitalWrite(blueLed, LED_ON); // Make sure blue LED is on
delay(200);
digitalWrite(blueLed, LED_OFF); // Make sure blue LED is off
delay(200);
digitalWrite(blueLed, LED_ON); // Make sure blue LED is on
delay(200);
}
////////////////////// Check readCard IF is masterCard ///////////////////////////////////
// Check to see if the ID passed is the master programing card
boolean isMaster( byte test[] ) {
if ( checkTwo( test, masterCard ) )
return true;
else
return false;
}